|
The Remote control interface is used both for operating a virtual robot, and the real Kawasaki robot, in the latter case by using the connection scheme described above. The corresponding Windows application generates a multi-window friendly interface. In its upper part there are login and password fields, color indication of connection to the Internet Laboratory Web-server, and the robot status field. 
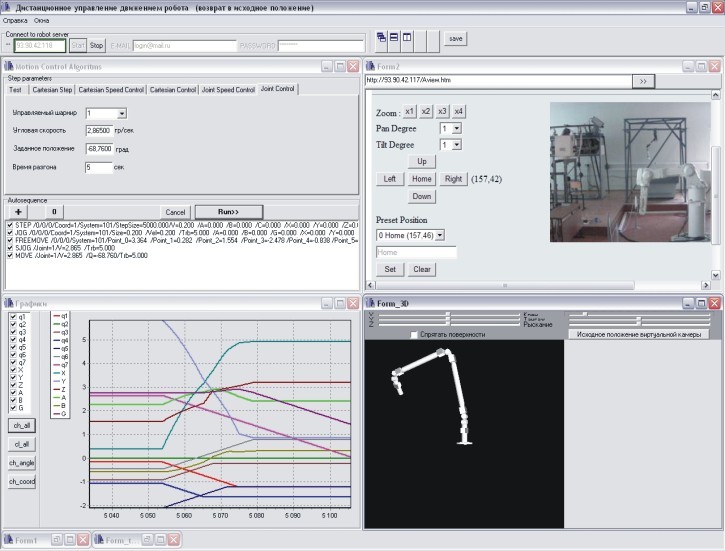 A separate window is used for generating a robot mission from the following basic control commands, for which a user should set necessary parameters:
Free Move - moving to the point with the Cartesian coordinates set by a user;
Step - moving along one of the Cartesian coordinate axes of the gripper for the distance set by a user;
Jog - moving the gripper along one of the six Cartesian coordinate axes with the speed set by a user;
Single Joint Jog - movement in one of the joints with the set speed;
Single Joint Move - moving one of the joints to the position set by a user;
Test - sending stepped control impulses to each DOF driver in turn.
After the generated mission is sent to the Web-server, the program starts collecting data on the robot state. These data are presented in the form of a chart, graphs and 3D robot model in the corresponding windows.
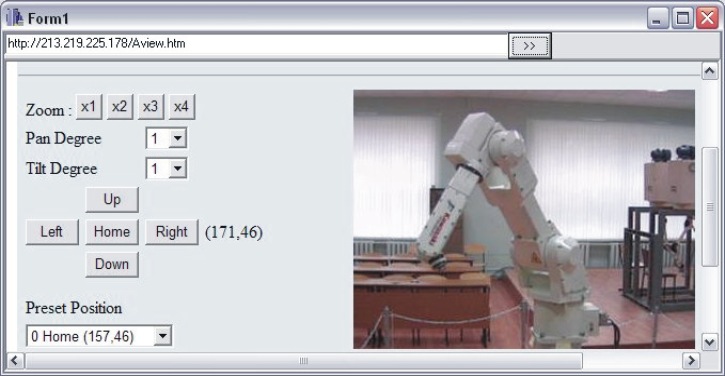
When a user operates the real robotic equipment, he can see a dynamic video image of Kawasaki robot in the window for receiving information from the TV camera server. This allows the user to compare the movements of the 3D model and real robot.
The advanced user interface and flexible calculation scheme make it possible to simulate and imitate by means of the available equipment the operation of a wide range of robot manipulators in the normal and abnormal modes. This makes the Internet Laboratory useful for different levels of specialist training both in design and operation of robotic systems.
|